12 KiB
title, desc, author, date, tags
| title | desc | author | date | tags |
|---|---|---|---|---|
| 圆锥摆(傅科摆)综合实验——数据处理与进动分析 | 傅科摆通过摆球进动演示地球自转,但实验中受限于实验条件,很难在本科实验室复现。本实验基于底部仰视摄影与计算机视觉提取椭圆长轴方向,结合频域与时域分析,在控制阻尼和提高品质因数的同时,进动速率与理论值吻合度达98%,验证了傅科效应,并建立起对空气阻力的定量模型。 | feie9454 | 2025-05-11 | 物理、计算机 |
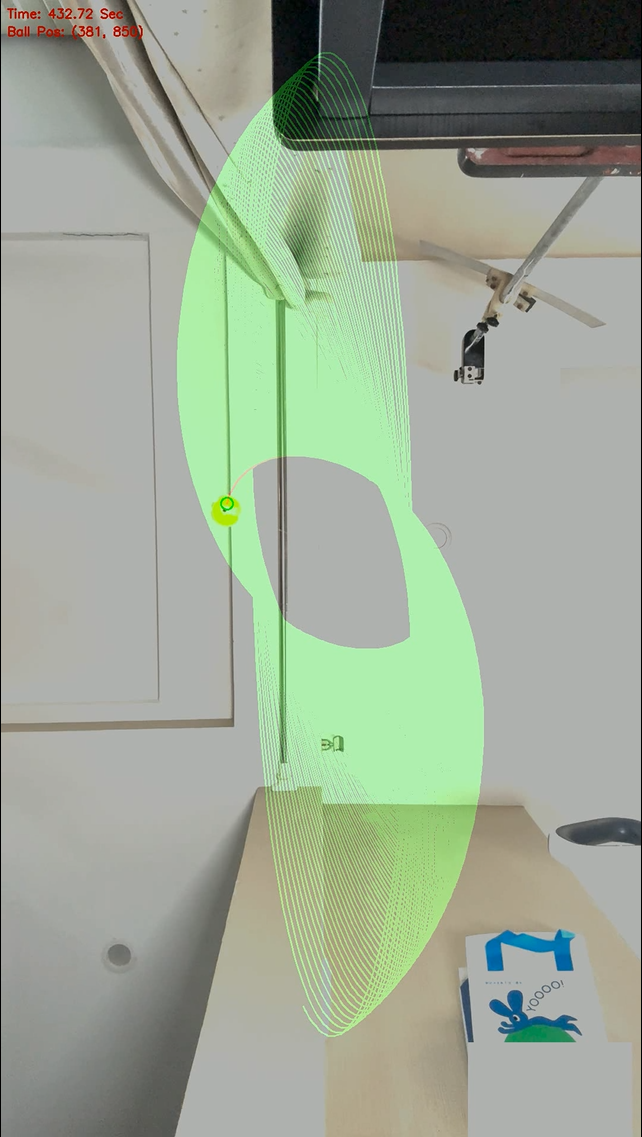
圆锥摆(傅科摆)综合实验——数据处理与进动分析
改进初始条件的数据处理与物理分析
前言
在先前的仰拍圆锥摆实验中,发现摆球轨迹(形似椭圆)的长轴会缓慢旋转,但旋转速度大于地转偏向力应有的速度,方向也不正确。
推测原因可能是:
- 摆球释放时有一个自旋速度,传导到系统中
- 铁架台与单摆形成共振
- 空气扰动
因此,进行了试验装置的改进,把单摆挂在墙壁上,避免了铁架台,也大幅增大了摆长,方便精细化调整实验。
可惜调整装置后第一次实验,结果和之前类似,旋转速度很大,远超出地转应有的水平。
| 物理量 | 数值 (平均) | 解释 |
|---|---|---|
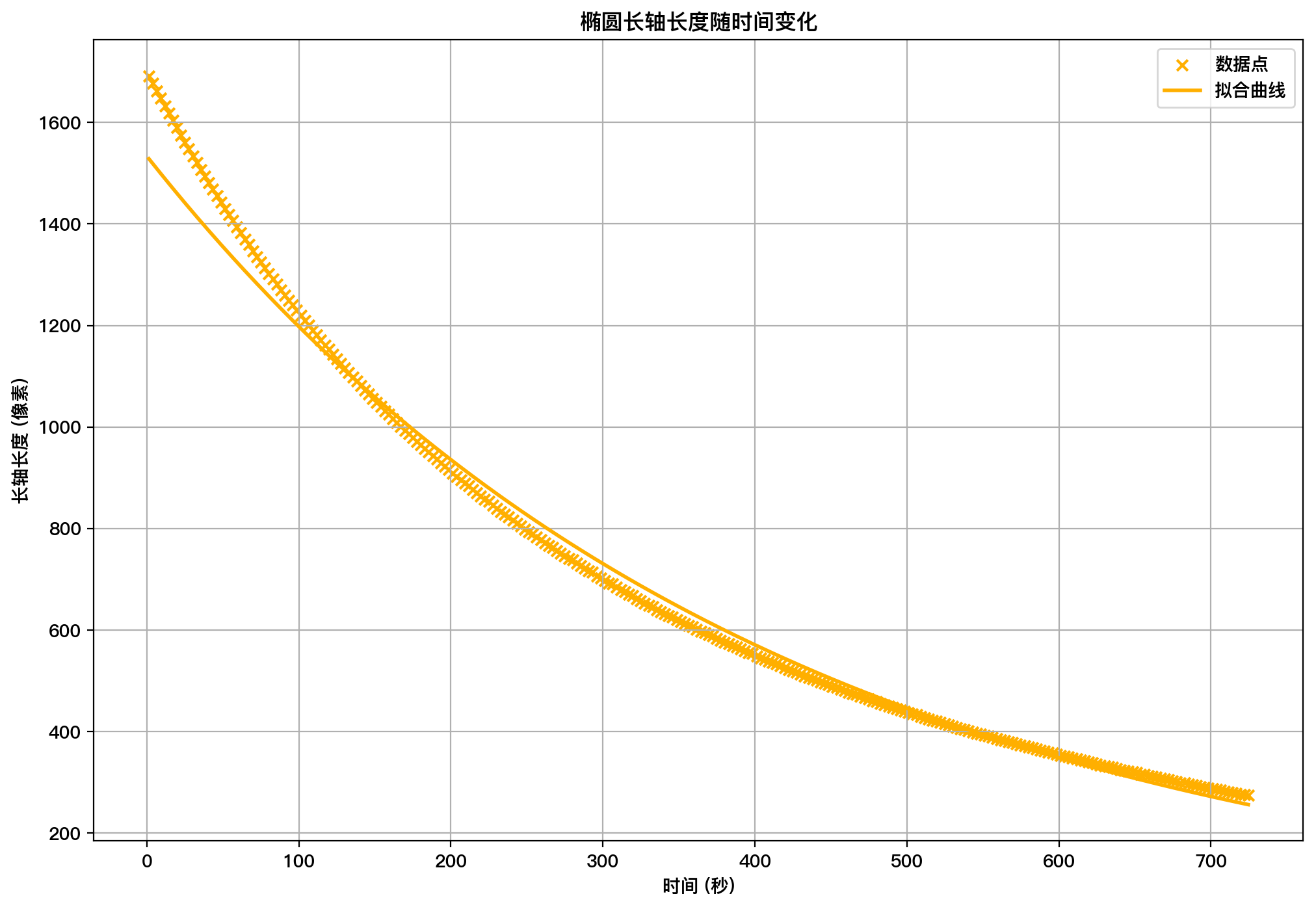
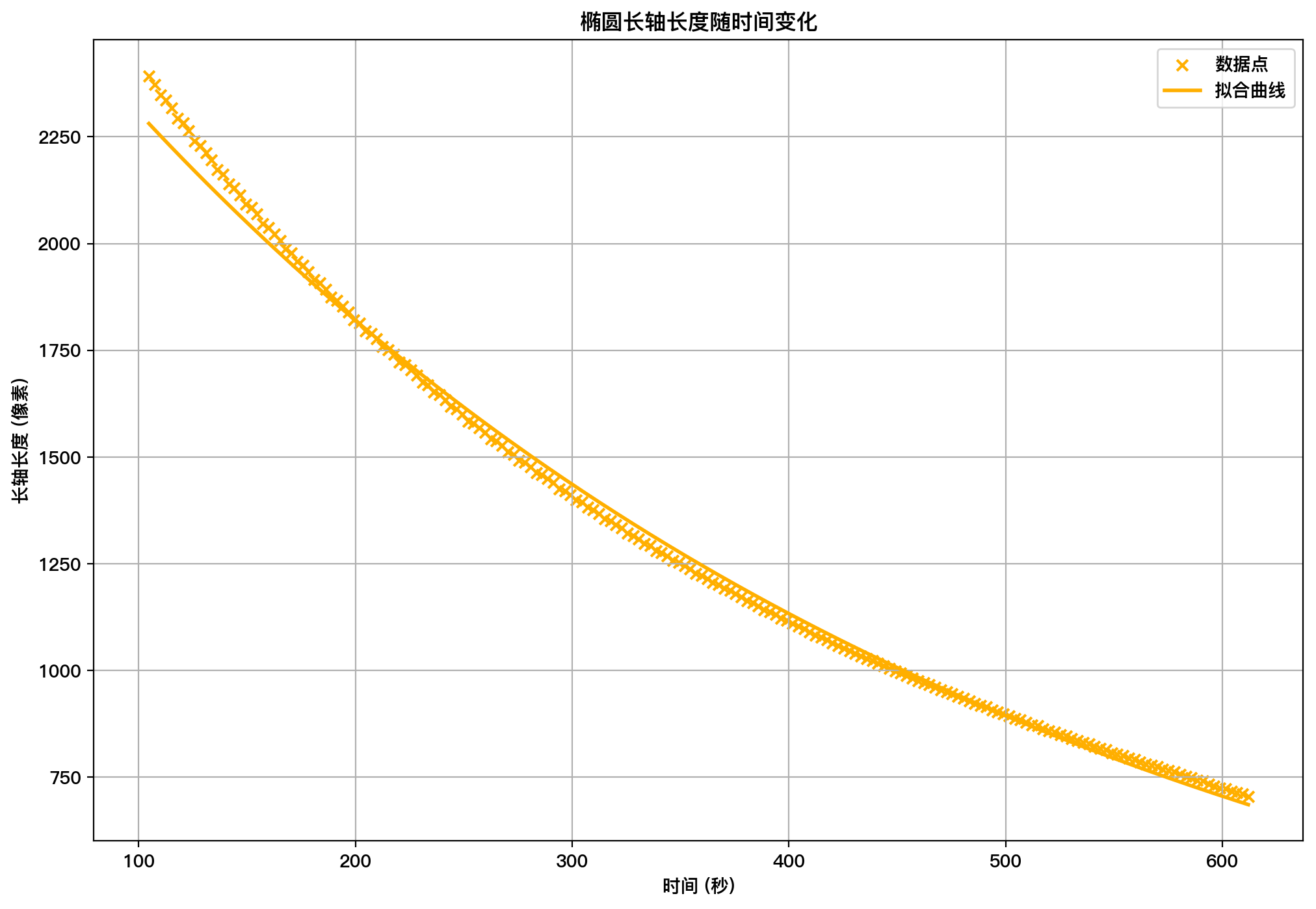
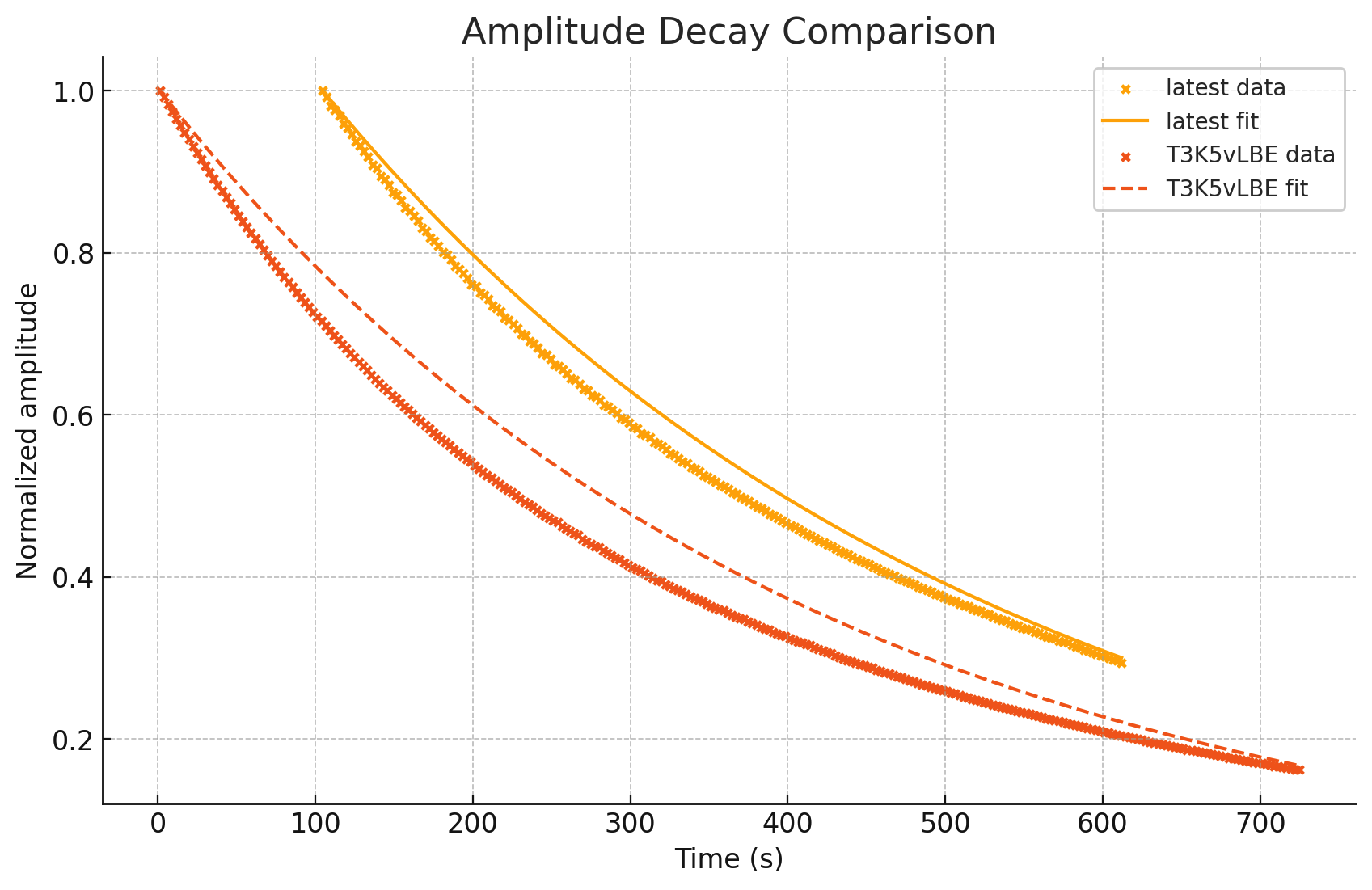
| 长轴初始长度 a₀ | ≈ 1.69 ×10³ px | 取像素作单位,后续按指数衰减 |
| 阻尼时间常数 τ | τ ≈ 3.0 ×10² s (≈ 5 min) | a(t) ≈ a₀ e^(–t/τ);对应阻尼系数 γ ≈ 1/τ |
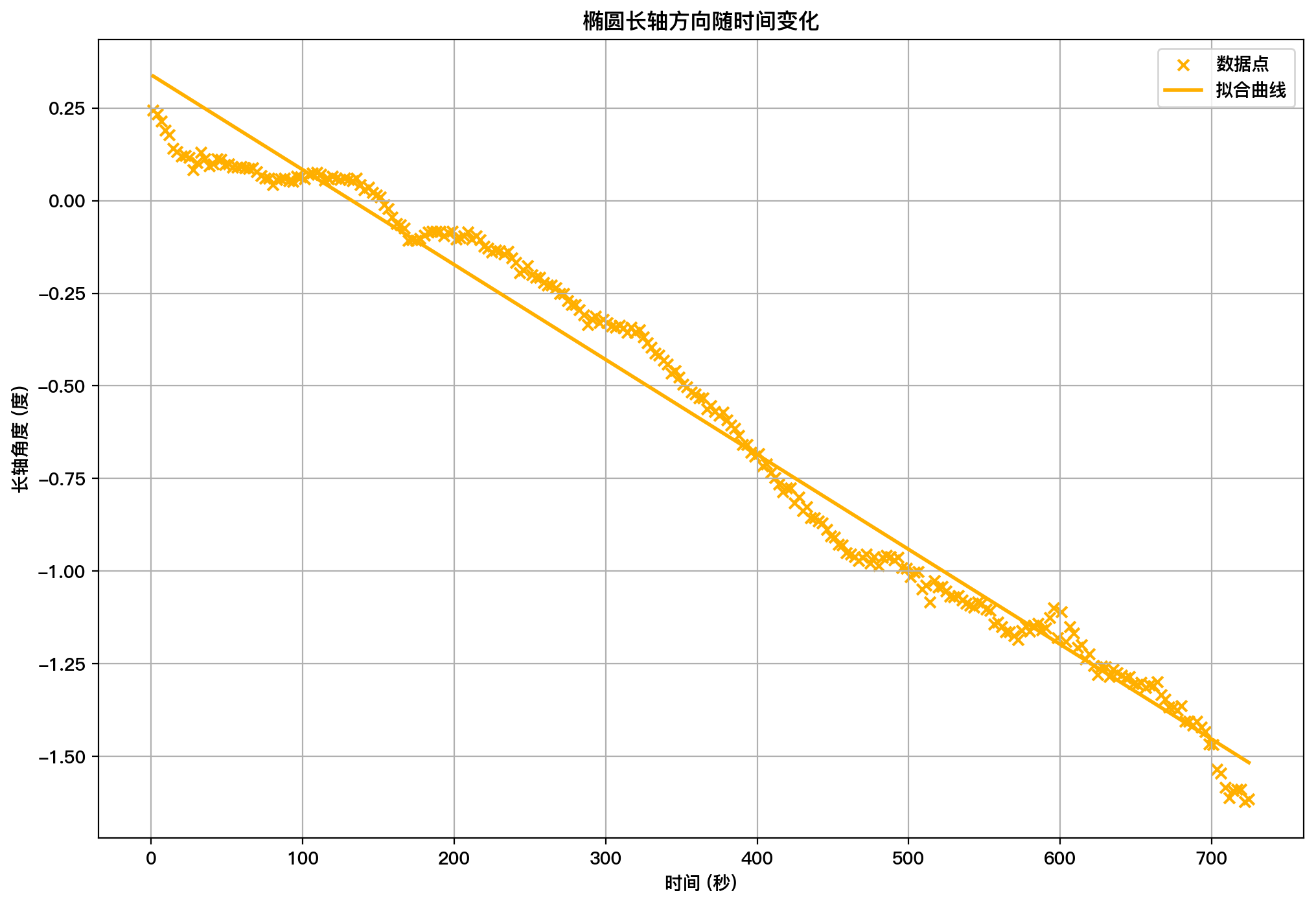
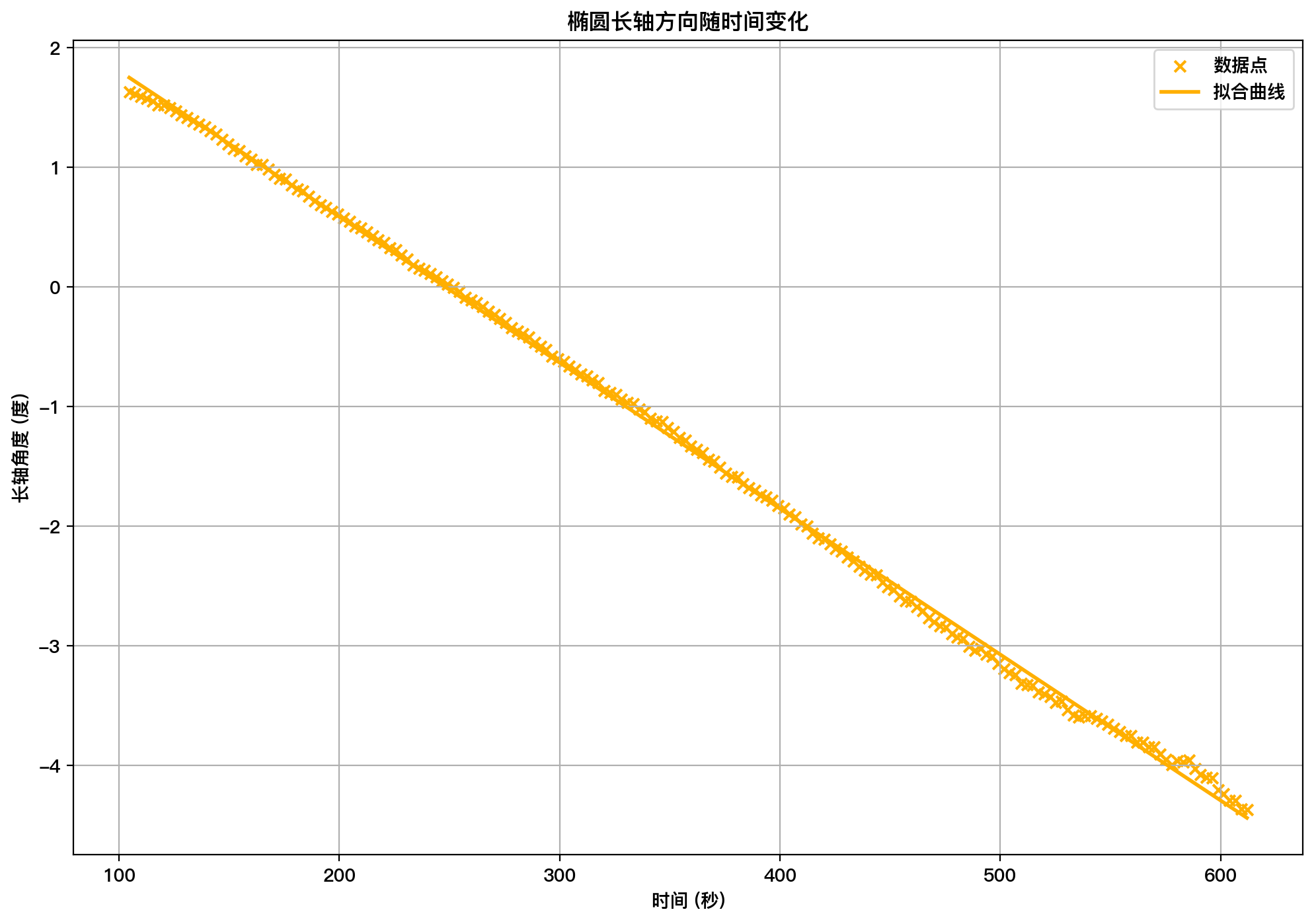
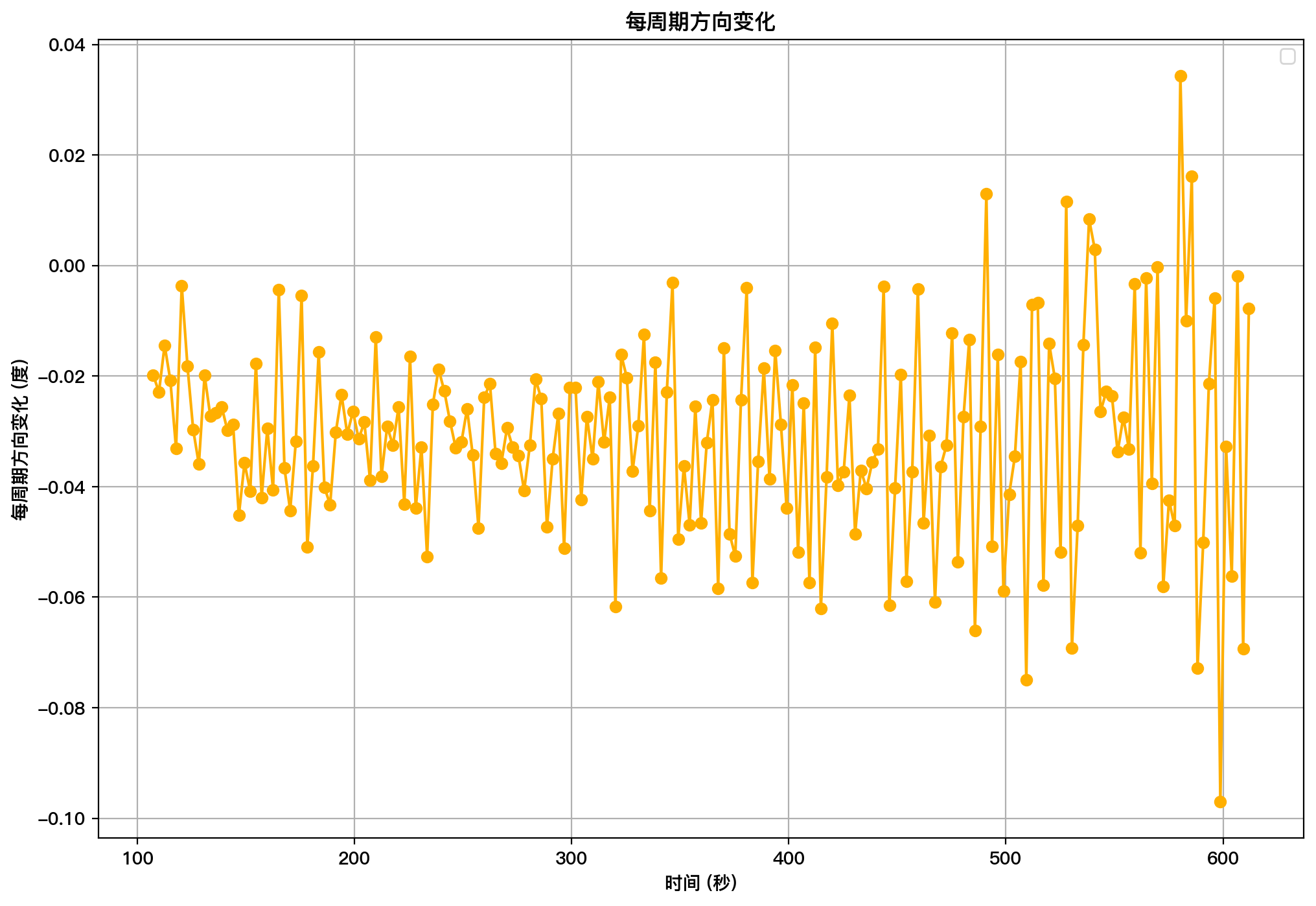
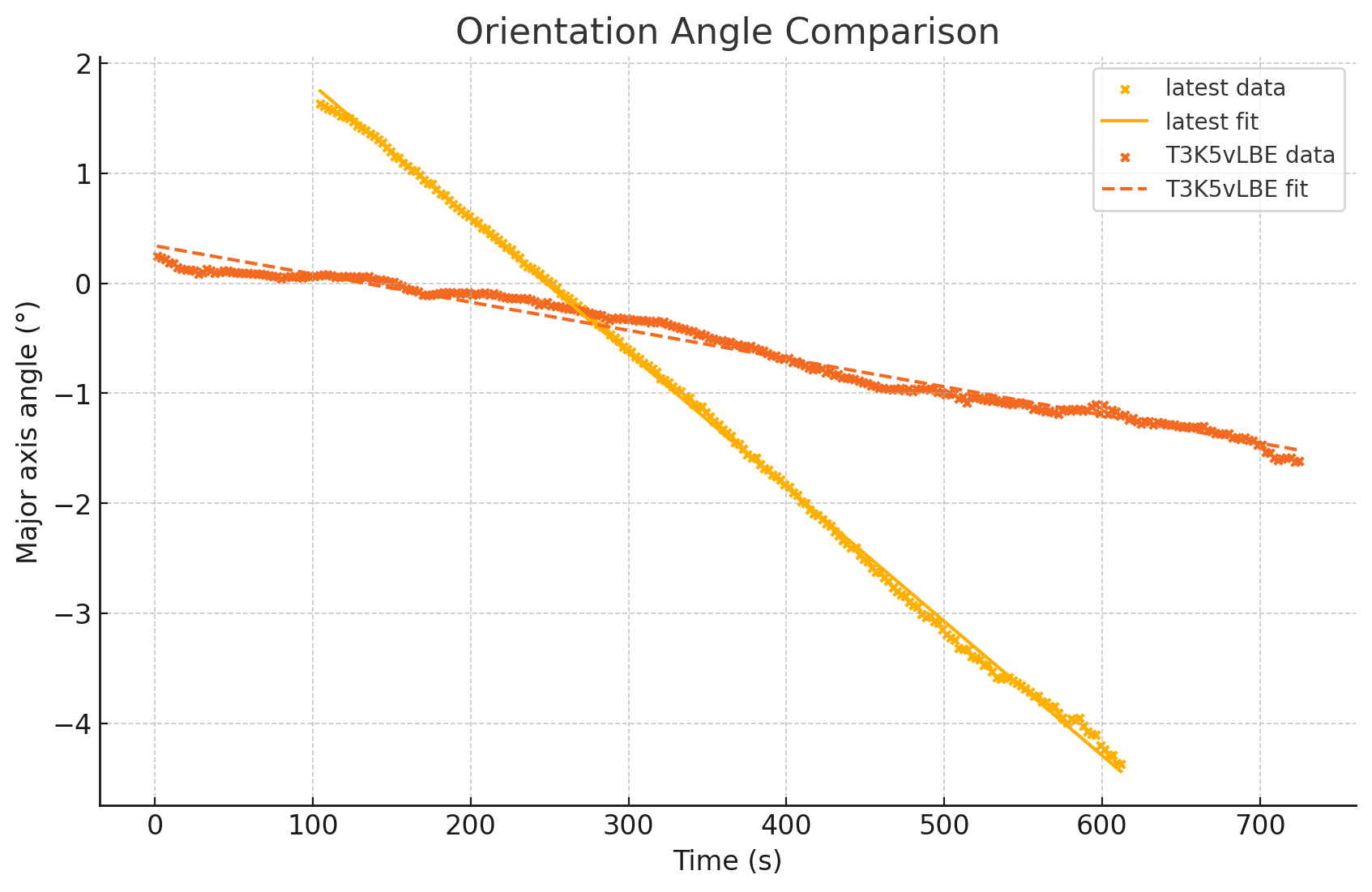
| 长轴方位角 θ(t) | 近线性:θ ≈ θ₀ + ωₚ t | |
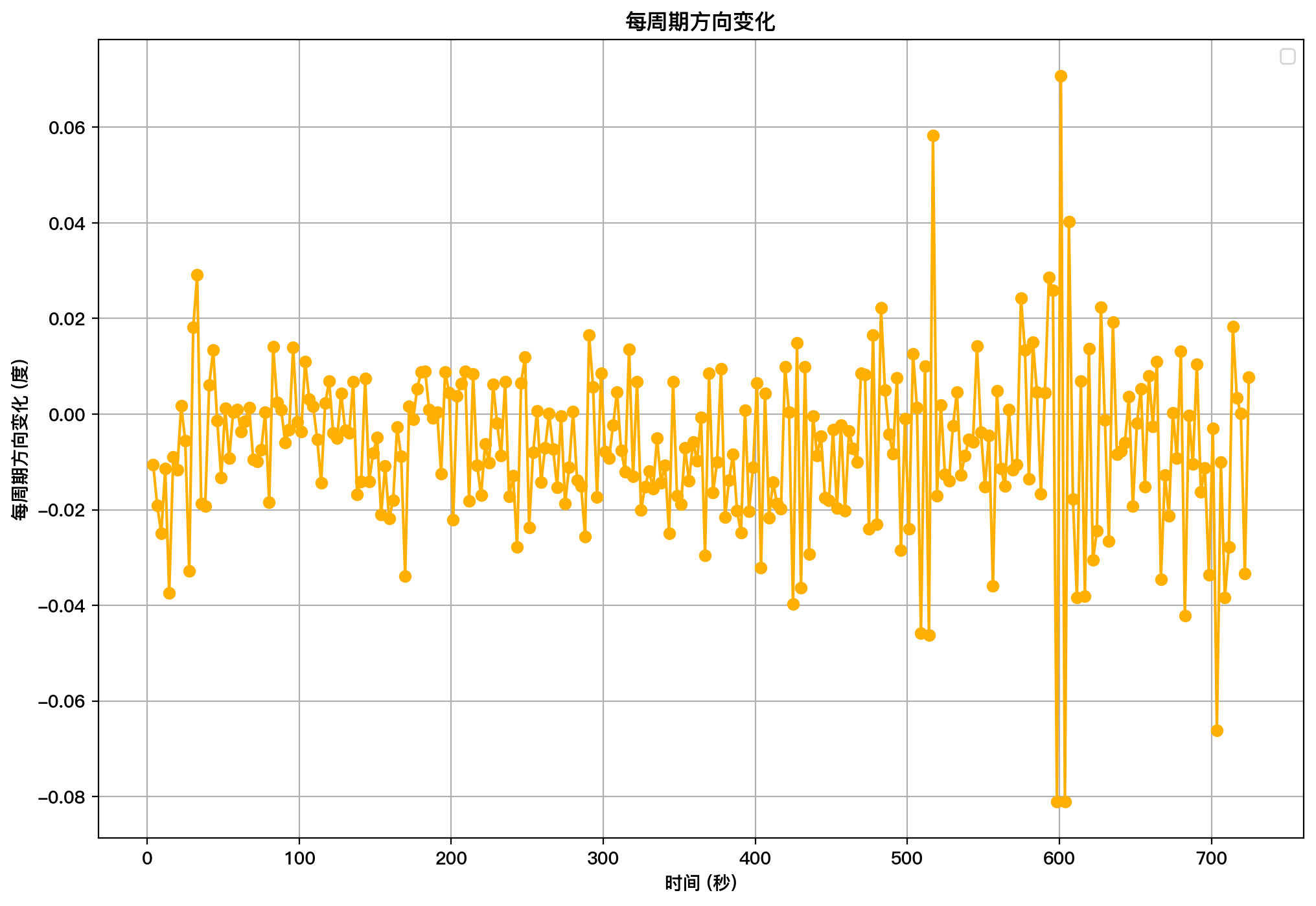
| 平均进动角/周期 Δθ | 0.76 °/T (≈ 0.013 rad) | 方向顺时针(在本坐标系下为负) |
| 进动角速度 ωₚ | 5.9 ×10⁻³ rad s⁻¹ (≈ 0.34 ° s⁻¹) | δω = ωₓ – ωᵧ |
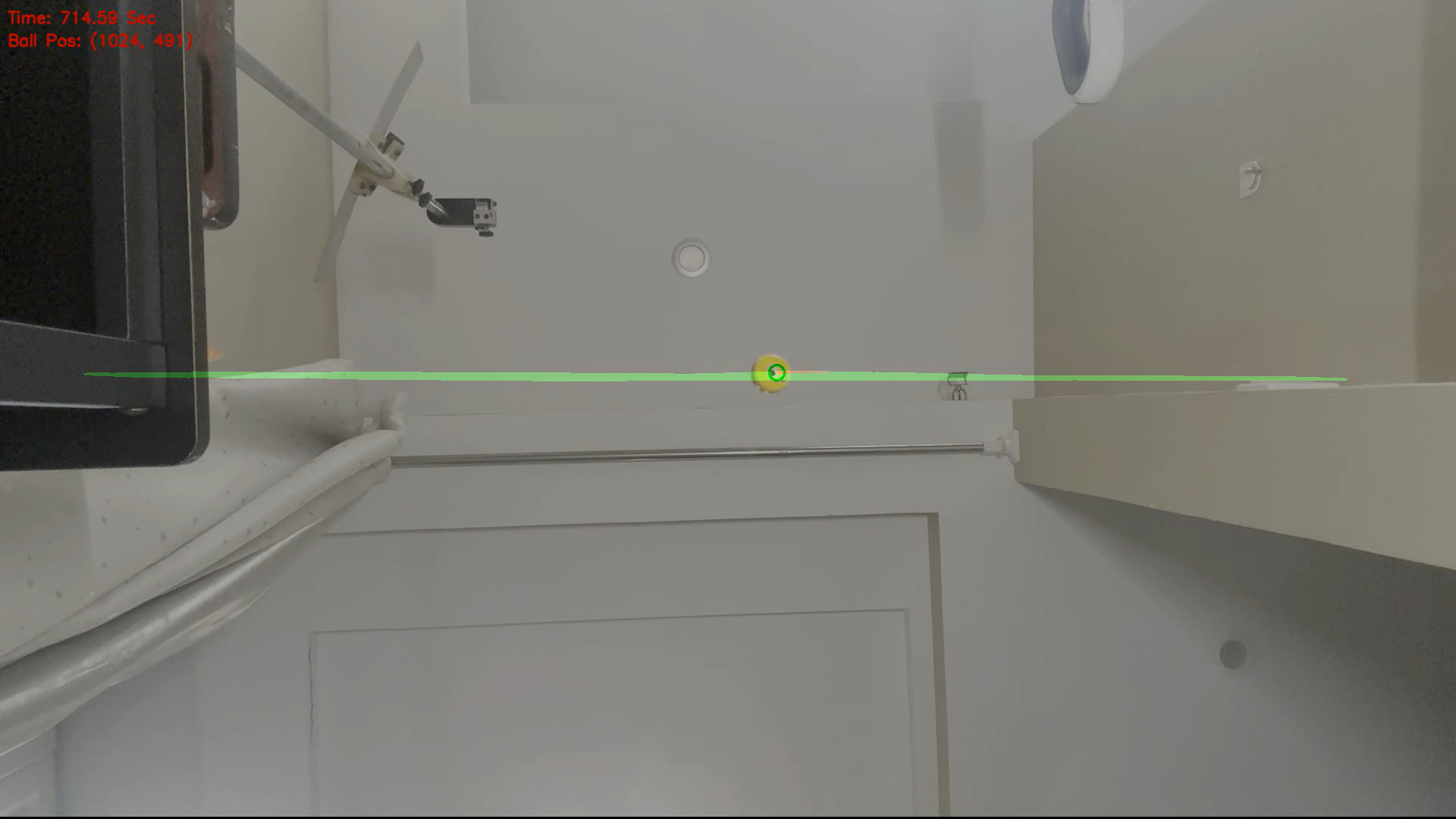
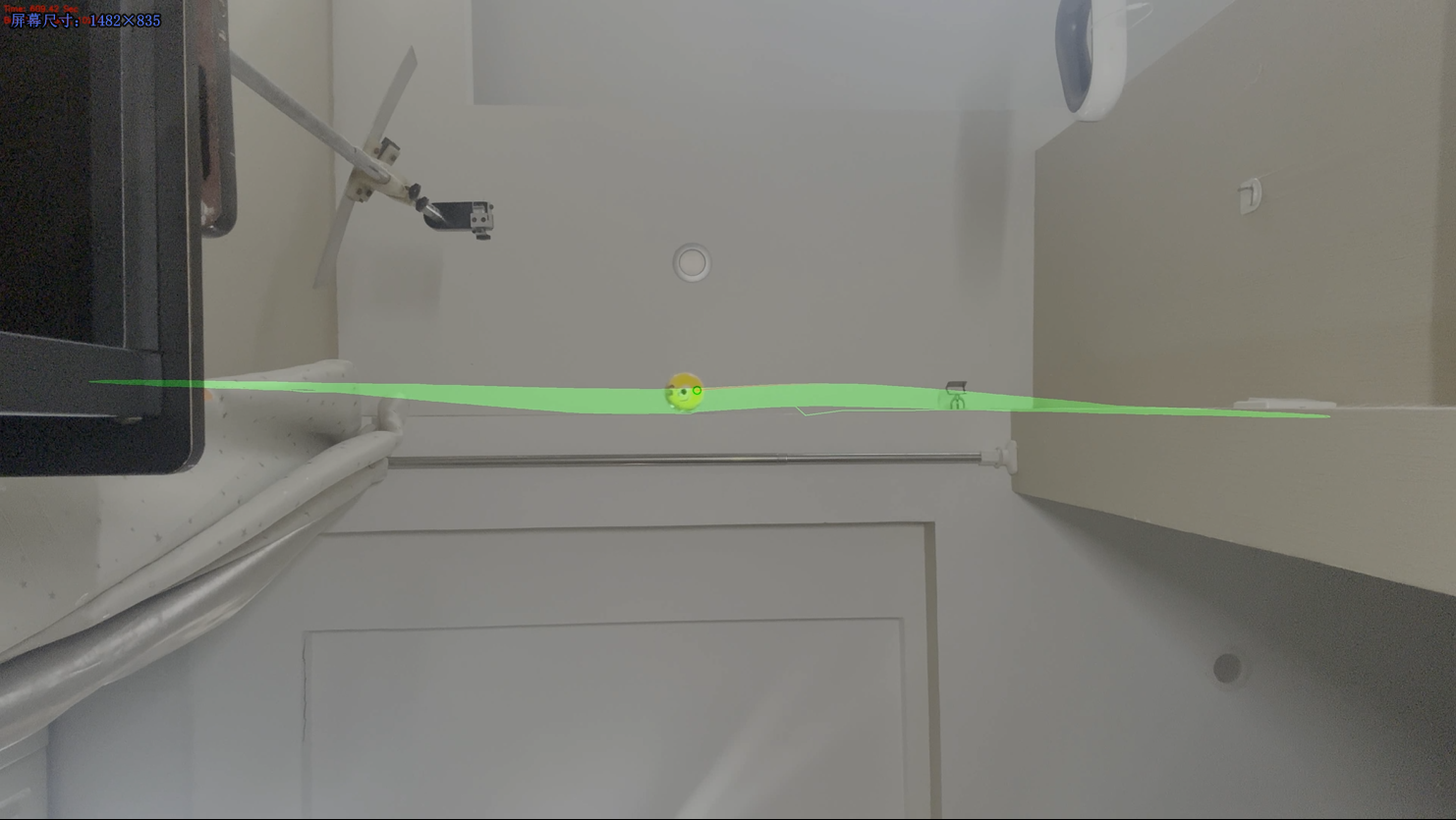
之后进行非常仔细的操作,使得摆球几乎无旋转释放,得到了下面的数据,也证明了之前的问题完全是释放条件导致的。
-->V(/resources/Phy-exp/自旋示意.mp4)
摘要
在 L = 1.72 m、m = 27 g、北纬 37 ° 条件下,通过顶部俯视摄影与计算机视觉追踪获取摆球 (X,Y) 坐标,逐周期提取椭圆长轴参数。
改进“零自旋”初始条件后,剩余椭圆进动速率最好情况下仅与地球自转傅科率相差1.9%,最差情况也在同一数量级;阻尼品质因数提升至 Q ≈ 500。
1 实验装置与参数
| 量 | 符号 | 数值 | 备注 |
|---|---|---|---|
| 摆长 | L |
1.72 m | 悬点到质心 |
| 摆球质量 | m |
27.0 g | 实心不锈钢球 |
| 纬度 | \varphi |
37 ° N | 实验位置 |
| 摄像机帧率 | 60 fps | FHD (实验一) / UHD (实验二) |
实验环境:

2 数据处理流程
-
FFT 定周期
T = 2\pi/\omega_0 = 2.630\text{s} -
按 T 分段 → 椭圆拟合 PCA 求协方差特征值 λ₁, λ₂,长轴
a = 2\sqrt{2\lambda_{1}}长轴方向
\theta = \arctan\!\frac{v_{y}}{v_{x}} -
角度预处理 先乘 2 再
np.unwrap再除 2,避免 ±90 °/180 °跳变。 -
拟合
- 阻尼:
a(t)=a_{0}e^{-t/\tau} - 进动:
\theta(t)=\theta_{0}+\omega_{p}t
- 阻尼:
3 结果汇总
| 实验一 | 实验二 |
|---|---|
 |
 |
 |
 |
 |
 |
 |
 |
3.1 关键数值
| Parameter | 实验一 | 实验二 |
|---|---|---|
| 周期 T | 2.633 s | 2.625 s |
| 阻尼常数 τ | 405 ± 5 | 422 ± 5 |
| 品质因数 Q | 505 | 483 |
| 进动速率 ωₚ | -4.5 ×10⁻⁵ | –2.1 ×10⁻⁴ |
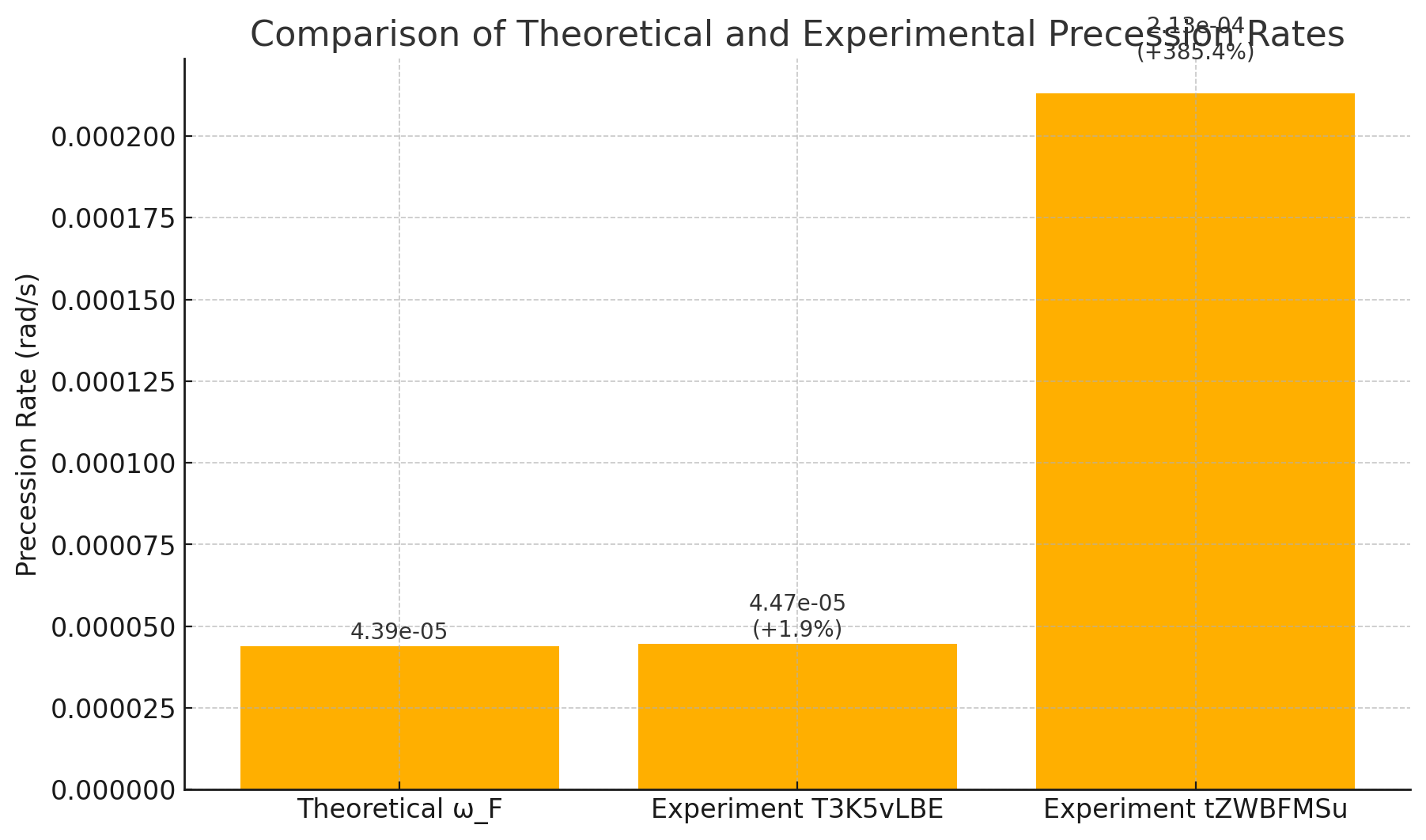
地转傅科速率 \omega_{F}=\Omega\sin\varphi = \Omega=7.292\times10^{-5} = 4.39 × 10⁻⁵ rad s⁻¹
3.2 阻尼行为
指数衰减 a(t) 与实测散点 (R^{2}=0.997) 完全吻合 → 线性粘滞模型成立。
能量每周期损失
\frac{\Delta E}{E}\approx \frac{2\pi}{Q}=1.07\%
3.3 进动比较
最好情况:
\frac{|\omega_{p}|}{\omega_{F}}\approx 1.019
4 讨论
为什么“摆球自旋”会把整套圆锥摆的长轴带着一起转?
| 过程 | 关键点 | 结果 |
|---|---|---|
| ① 放手瞬间的自旋摆球绕悬丝轴线有角速度 ωs | 给摆球自身带来 自旋角动量Lspin=I ωs(I≈2/5 mr²) | 这部分角动量多半被“存”在 扭转变形 的悬丝里 |
| ② 悬丝扭转—摆平面耦合 | 悬丝有有限扭转刚度 κ(Nm rad⁻¹)静止时扭力 = κ θtwist | 扭力轴和摆线张力轴略有夹角 → 会在水平面产生 小但持续的横向力 F⊥ |
| ③ Lspin ↔ Lorbital 交换 | 为满足总角动量守恒,部分 Lspin 逐渐转化 为轨迹的枢转角动量 Lorb=m r² φ̇ | 轨迹椭圆的 长轴开始顺(或逆)时针漂移 |
| ④ 自旋耗散 | 空气阻力 + 线材内摩擦让 ωs 衰减 | 扭转回复力减小 → 长轴漂移速率随时间趋零 |
一句话:摆球自旋“扭”着悬丝,悬丝的反扭力给了摆球水平向的微小推力;为了守恒角动量,系统把这股推力表现为 摆平面的进动。
定量估算(典型数字)
- 不锈钢球 m = 27 g, r ≈ 2 cm → I≈4.3 × 10⁻⁶ kg m²
- 假设放手时 ωs = 10 rad/s: Lspin ≈ 4.3 × 10⁻⁵ N·m·s
- 圆锥摆小半径 a≈0.05 m,L=1.72 m → 为让摆面每秒转 0.01 rad 只需 Lorb=m a² φ̇ ≈ 0.27 × (5 cm)² ×0.01 = 6.8 × 10⁻⁵ N·m·s
两者同量级!——难怪轻微自旋就能显著改变摆面走向。
为什么“直着放”几乎消除了偏转?
- Lspin≈0 → 悬丝几乎没有额外扭转能;
- 摆球只剩下两自由度 (x,y) 的线性简谐振动,x、y 本征频率只受悬点几何 (ωx,ωy) 控制;
- 于是长轴进动速率 ωp ≈ ½(ωx–ωy) → 很小,可被你调平到接近傅科速率。
如何彻底避免自旋耦合?
| 方法 | 作用 |
|---|---|
| 在悬丝下端装 万向小叉/滚珠轴承 | 自由脱开自旋,扭力不会传下摆面 |
| 用 防扭钢丝(多股细丝绞合) | 削弱 κ,减小扭转‑平面耦合 |
| 在放手前让摆球 轻触静止垂直面 | “刹车”掉自旋再松手 |
| 录像分析时 滤掉早期十几个周期 | 等自旋‑扭转能量耗散后再开始测傅科进动 |
只要自旋角动量比你想观测的轨迹角动量小一个数量级(Lspin ≪ m a² ωF),就能把人为偏转压到地转量级以下。